|
Welcome to the world of APRIL tags! For those not familiar with the acronym, it stands for Autonomy, Perception, Robotics, Interfaces, and Learning. They were developed by Ed Olson's lab at the University of Michigan in 2011 and they have been very popular in the field of robot localization. April tags are visual fiducials which is just a fancy way of saying they are user-generated markers that allow a robot to determine its pose via a single camera. For a baseline we are using the code developed by Dr. Michael Kaess from Carnegie Mellon University which is an extension of Ed's code. The code landing page can be found here.
The first step is to print out a sample April tag like the one below. I have included a nice PDF file that contains this tag here. Pull down the PDF and print it out. This tag will be used to test out the April tag pose detection software.

The next step is to grab a linux computer or setup a linux virtual box which is discussed in this blog post. You will then want to make sure that your linux camera indeed works. From the terminal you can install the v4l-utils package and then list out your video devices via the commands below.
If your device does not come up you may need to enable your webcam which can be done by clicking on the Devices menu and selecting the Integrated Webcam.
Once your camera is recognized in linux type in the below commands at the terminal prompt. These commands will install the necessary libraries, pull down the April tag code base, compile, and run the code.
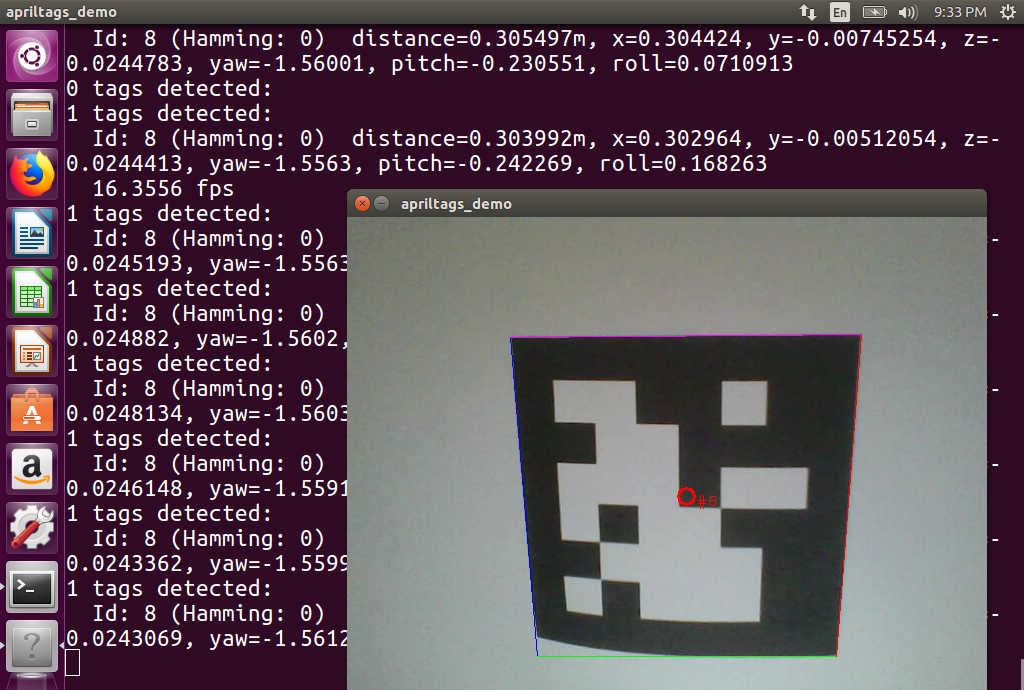
When the code is executed, hold up your April tag printout to your camera and you should see something like the image below. The April tag on the paper should be located, and the pose of the tag should also be determined. Congratulations you just found your first April tag!

0 Comments
Your comment will be posted after it is approved.
Leave a Reply. |
