
Publications
For a great tutorial on how drones fly and how to model them make sure to check out Quadcopter Plant Model and Control System Development With Matlab/Simulink Implementation.
|
|
[Articles]
[Master's Projects/Thesis]
- Model Based Design of a Real Time FPGA-Based Lens Undistortion and Image Rectification Algorithm for Stereo Imaging
- Initial Performance Analysis of the At-Altitude Radiance Ratio Method for Reflectance Conversion of Hyperspectral Remote Sensing Data
- YOLBO: You Only Look Back Once–A Low Latency Object Tracker Based on YOLO and Optical Flow
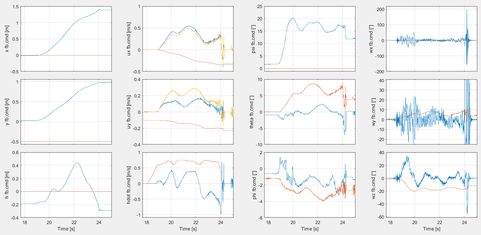
- Quadrotor Drone System Identification via Model-Based Design and In-Flight Sine Wave Injections
- A Model Free Control Algorithm Based On The Sliding Mode Control Method With Applications to Unmanned Aircraft Systems
- MX-1: A New Multi-Modal Remote Sensing UAS Payload with High Accuracy GPS and IMU
[Master's Projects/Thesis]
- Real-Time UAV Pose Estimation and Tracking Using FPGA Accelerated April Tags
- YOLBO: A Low Latency Object Tracker Based on YOLO and Optical Flow for Low Resource Usage
- Model-Free Control of an Unmanned Aircraft Quadcopter Type System
- A Model-Free Control Algorithm Based on the Sliding Mode Control Method with Applications to Unmanned Aircraft Systems
- Model-Based Design for Visual Localization via Stereoscopic Video Processing
- Quadcopter Plant Model and Control System Development With MATLAB/Simulink Implementation
- A Novel Real-Time Image Processing Verification Framework Targeted to the Zynq SoC for Drone Localization Applications
- FPGA SoC Fiducial System for Unmanned Aerial Vehicles